Just completed the Montreal Robotics Summer School 2025 🇨🇦
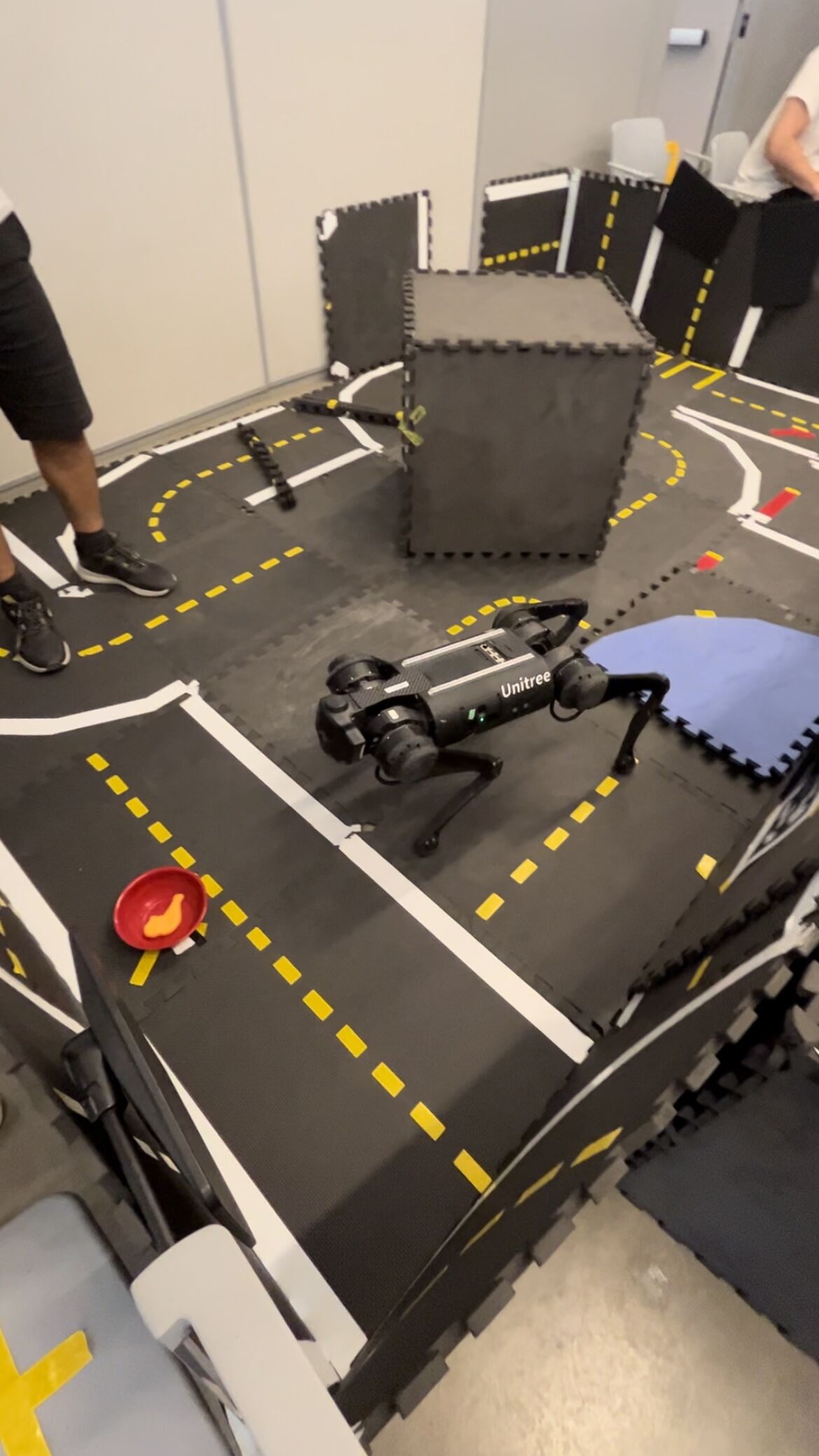
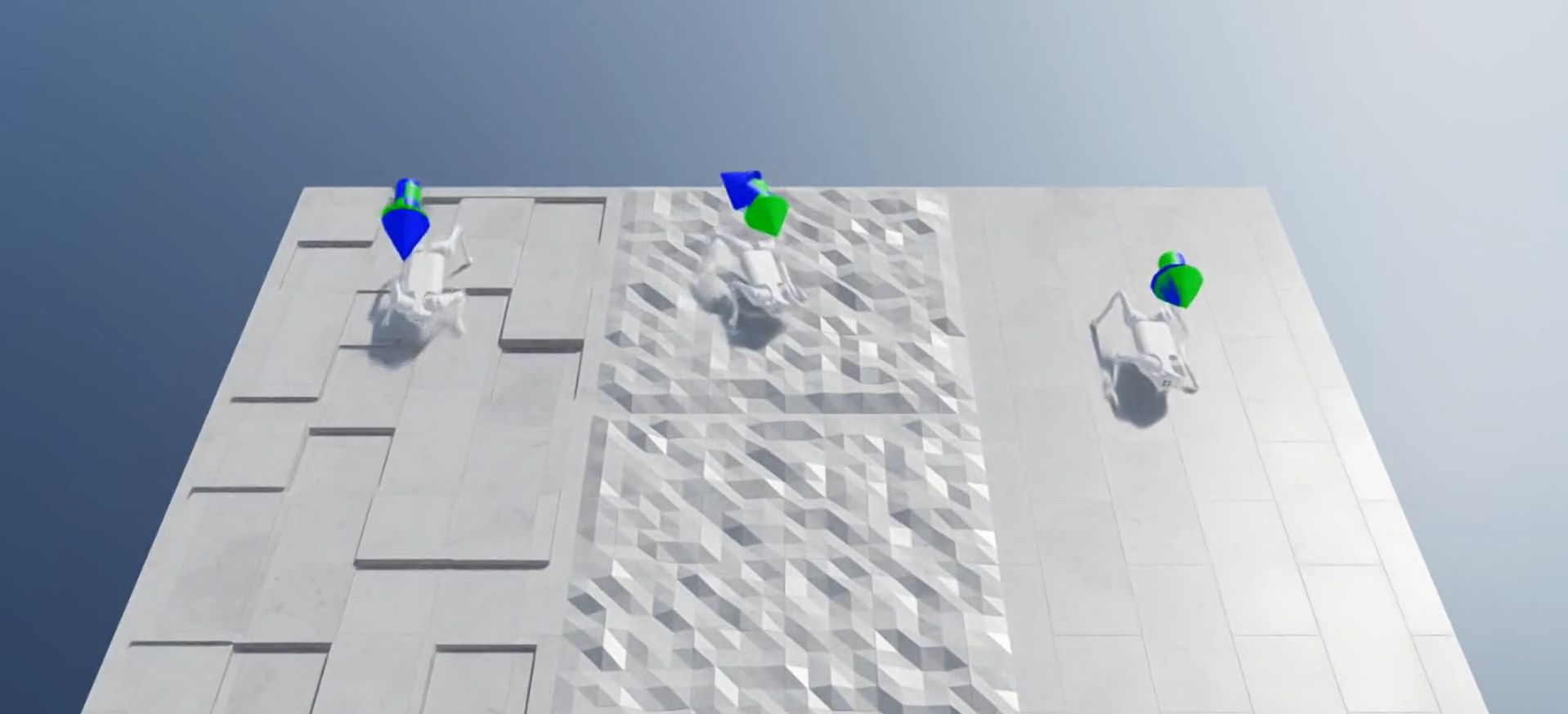
It was an exciting and enriching experience where we explored advanced topics in robot perception, SLAM, sim2real transfer, and deep learning-based control. During the hands-on sessions, we tested our solutions on the LoCoBot and the Unitree Go1 quadruped robot, and also worked with NVIDIA Isaac Lab for simulation and deployment.
Highlights
- Implemented policy learning for locomotion/control; explored CrossFormer-based architectures for sequence modeling.
- Built and validated behaviors in Gazebo simulation; transferred policies to real hardware.
- On LoCoBot: pipeline for pick-and-place (perception → planning → execution).
- On Unitree Go1: training/tuning of policies and evaluation on real robot.
- Used NVIDIA Isaac Lab for sim & toolchains (dataset generation, evaluation, deployment).
🔗 Program info: Montreal Robotics Summer School 2025 @ Mila
[Summer School Gallery]